
自主视觉机器鱼样机
发布时间: 2009-12-28 05:06:00
自主视觉机器鱼
该自主视觉机器鱼是以一类盒子鱼(boxfish)为模仿对象设计的。Boxfish的特点就是身体成比较规则的类长方体,尾巴退化成细长的扇形。


盒子鱼(boxfish)
我们的目标是外形设计上模仿boxfish,在功能设计上可以实现自主定位、自主导航、自主通讯、自主决策,并且易于功能扩展和二次开发的自主游动机器鱼。通过建立开放的操作系统平台,便于后续功能模块的添加,满足更高层次的控制要求。

该机器鱼由一个主舱体、一对胸鳍和一条尾鳍组成,胸鳍和尾鳍的输出轴通过动密封机构与主舱体内的舵机相连。外壳采用上下分体的形式,部分元器件固定在下壳体内,电路板和摄像头则位于上壳体内,这种配置方式,易于拆卸和维护。上壳体采用透光度极好的聚甲基丙烯酸甲酯材料,方便水平方向上可以左右各90度旋转的CMOS摄像头透过上壳体采集环境信息;下壳体采用丙烯腈-丁二烯-苯乙烯共聚物,以减轻机器鱼自身重量,提高控制精度。该机器鱼采用整体密封的形式,上下壳体之间利用直口加O圈的密封方法,防水效果明显。
控制系统以arm9 处理器S3C2440为核心,设计了独立的电源控制模块,并且选择具有较高比能量的锂电池组作为机载电源。整个控制系统置于密封盒内,防水防潮,保证系统的稳定运行。可通过搭建开放的操作系统平台,方便系统的管理、资源的优化配置、后续功能模块的扩展和用户的二次开发,满足更高层次的控制要求。

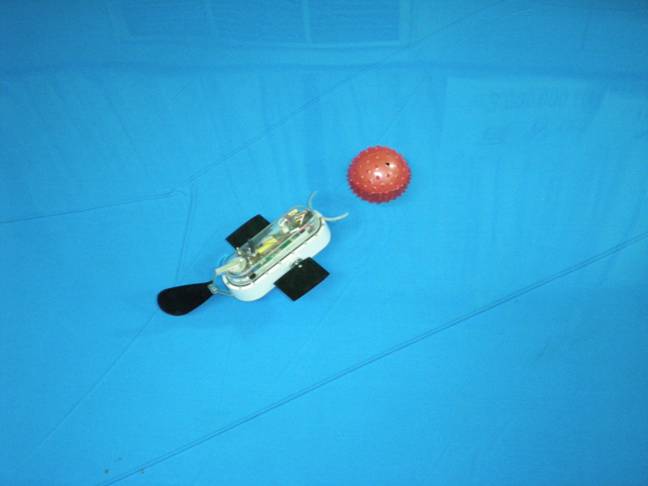
机器鱼样机 机器鱼戏球
针对小型水下推进设备,采用硬木材质的胸鳍和小展弦比的扇形橡胶材质的尾鳍作为推进机构,通过对胸鳍和尾鳍的协调控制,可实现前进、后退、转弯、上升、下潜以及刹车等功能。该机器鱼具有多种仿生推进模式:利用尾鳍左右摆动推进,速度快,机动性能好;依靠一对胸鳍绕输出轴振动推进,对水面的扰动小,具有良好的隐蔽性;尾鳍和胸鳍结合的推进模态,则在低扰动下,具有灵活的三维运动能力。